

Mathematical Modelling Questions And Answers Pdf
Consider a linear time-invariant system whose input r(t) and output y(t) are related by the following differential equation:
\(\frac{{{d^2}y\left( t \right)}}{{d{t^2}}} + 4y\left( t \right) = 6r\left( t \right)\)
The poles of this system are at- +2j, -2j
- +2, -2
- +4, -4
- +4j, -4j
Answer (Detailed Solution Below)
Option 1 : +2j, -2j
Concept:
A transfer function is defined as the ratio of Laplace transform of the output to the Laplace transform of the input by assuming initial conditions are zero.
TF = L[output]/L[input]
\(TF = \frac{{C\left( s \right)}}{{R\left( s \right)}}\)
For unit impulse input i.e. r(t) = δ(t)
⇒ R(s) = δ(s) = 1
Now transfer function = C(s)
Therefore, the transfer function is also known as the impulse response of the system.
Transfer function = L[IR]
IR = L-1 [TF]
Calculation:
Given the differential equation is,
\(\frac{{{d^2}y\left( t \right)}}{{d{t^2}}} + 4y\left( t \right) = 6r\left( t \right)\)
By applying the Laplace transform,
s2 Y(s) + 4 Y(s) = 6 R(s)
\( \Rightarrow \frac{{Y\left( s \right)}}{{R\left( s \right)}} = \frac{6}{{{s^2} + 4}}\)
Poles are the roots of the denominator in the transfer function.
⇒ s2 + 4 = 0
⇒ s = ±2j
Which of the following modelling methods uses Boolean operations?
- Boundary representation
- Constructive solid geometry
- Surface modelling
- Wireframe modelling
Answer (Detailed Solution Below)
Option 2 : Constructive solid geometry
Explanation:
- Boolean operation is an important way in geometry modeling.
- It is the main way to build a complex model from simple models, and it is widely used in computer-aided geometry design and computer graphics.
- Traditional Boolean operation is mainly used in solid modeling to build a complex solid from primary solid e.g. cube, column, cone, sphere, etc.
- With the development of computer applications, there are many ways to represent digital models, such as parametric surface, meshes, point model, etc.
- Models become more and more complex, and features on models such as on statutary artworks are more detailed.
Let a causal LTI system be characterized by the following differential equation, with initial rest condition
\(\frac{{{d^2}y}}{{d{t^2}}} + 7\frac{{dy}}{{dt}} + 10y\left( t \right) = 4x\left( t \right) + 5\frac{{dx\left( t \right)}}{{dt}}\)
where x(t) and y(t) are the input and output respectively. The impulse response of the system is (u(t) is the unit step function)- 2e-2tu(t) – 7 e-5tu(t)
- –2e-2tu(t) + 7 e-5tu(t)
- 7e-2tu(t) – 2 e-5tu(t)
- –7e-2tu(t) + 2 e-5tu(t)
Answer (Detailed Solution Below)
Option 2 : –2e-2tu(t) + 7 e-5tu(t)
\(\frac{{{d^2}y}}{{d{t^2}}} + 7\frac{{dy}}{{dt}} + 10y\left( t \right) = 4x\left( t \right) + 5\frac{{dx}}{{dt}}\)
Apply Laplace transform on both sides,
s2Y(s) + 7sY(s) + 10Y(s) = 4 X(s) + 5s X(s)
⇒ (s2 + 7s + 10) Y(s) = (4 + 5s) X(s)
\(\Rightarrow \frac{{Y\left( s \right)}}{{X\left( s \right)}} = \frac{{\left( {4 + 5s} \right)}}{{{s^2} + 7s + 10}}\)
\(\Rightarrow \frac{{Y\left( s \right)}}{{X\left( s \right)}} = \frac{{4 + 5s}}{{\left( {s + 5} \right)\left( {s + 2} \right)}} = \frac{7}{{\left( {s + 5} \right)}} - \frac{2}{{\left( {s + 2} \right)}}\)
Apply inverse laplace transform
⇒ y(t) = 7e-5tu(t) – 2e-2t u(t)
For a tachometer, ie θ(t) is the an rotor displacement in radians, e(t) is the output voltage and kt is the tachometer constant in V/rad/sec, then the transfer function \(\frac{{E\left( S \right)}}{{\theta\left( S \right)}}\) will be:
- Kts2
- \(\frac{{k_t}}{s}\)
- Kts
- Kt
Answer (Detailed Solution Below)
Option 3 : Kts
Output = e(t)
Input =  (t)
(t)
\({\rm{e}}\left( {\rm{t}} \right) \propto \frac{{{\rm{d\theta }}\left( {\rm{t}} \right)}}{{{\rm{dt}}}}\)
Taking LT,
E(s) = Kts θ(s)
\(\Rightarrow {\rm{TF}} = \frac{{E\left( S \right)}}{{\theta\left( S \right)}} = {{\rm{k}}_t}s\)
The mechanical system shown in the figure below has its pole(s) at:
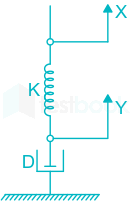
- -K/D
- -D/K
- -DK
- 0, -K/D
Answer (Detailed Solution Below)
Option 1 : -K/D
Concept:
Damping force:
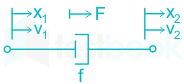
\(F = f\frac{{d\left( {{x_1} - {x_2}} \right)}}{{dt}} = f\left( {{v_1} - {v_2}} \right)\)
F: Damper force
f: Damper constant
x1, x2: Displacement at side 1 and side 2 of the damper
v1, v2: Velocity at side 1 and side 2
Spring force
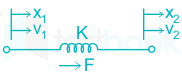
\(F = k\left( {{x_1} - {x_2}} \right) = k\mathop \smallint \nolimits \left( {{v_1} - {v_2}} \right)dt\)
k: Spring constant
Calculation:
Method 1:
Given damper constant is D and the Spring constant is k
Assuming that velocities at side 1 and 2

K ∫(y - x) dt + D (y – 0) = 0
Dy +k ∫ y dt – k ∫ x dt = 0
Applying the Laplace Transform
\(DY\left( s \right) + \frac{k}{s}Y\left( s \right) - \frac{k}{s}X\left( s \right) = 0\)
\(Y\left( s \right)\left[ {\frac{{Ds + k}}{s}} \right] = \frac{k}{s}X\left( s \right)\)
\(\frac{{Y\left( s \right)}}{{X\left( s \right)}} = \frac{k}{{Ds + k}}\)
Pole is present at s = - k / D
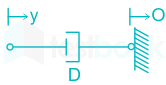
Method 2:
Given damper constant is D and the Spring constant is k
Assuming displacement at side 1 and 2
\(k\left( {y - x} \right) + D\frac{{d\left( {y - 0} \right)}}{{dt}} = 0\)
Applying the Laplace Transform
k Y(s) – k X(s) + D sY(s) = 0
Y(s) (k + Ds) – k X(s) = 0
\(\frac{{Y\left( s \right)}}{{X\left( s \right)}} = \frac{k}{{Ds + k}}\)
Pole is present at s = - k / D
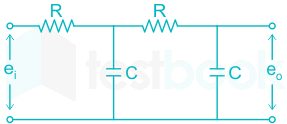
The transfer function of the network shown above is
- \(\frac{1}{{{s^2}{T^2} + 2sT + 1}}\)
- \(\frac{1}{{{s^2}{T^2} + 3sT + 1}}\)
- \(\frac{1}{{{s^2}{T^2} + sT + 1}}\)
- \(\frac{1}{{{s^2}{T^2} + 1}}\)
Answer (Detailed Solution Below)
Option 2 : \(\frac{1}{{{s^2}{T^2} + 3sT + 1}}\)
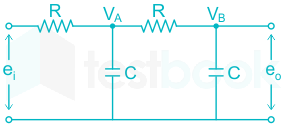
By applying KCL at node A,
\(\frac{{{V_A} - {e_i}}}{R} + \frac{{{V_A} - {V_B}}}{R} + \frac{{{V_R}}}{{{X_C}}} = 0\)
\(\Rightarrow {V_A}\left[ {\frac{2}{R} + \frac{1}{{{X_C}}}} \right] - \frac{{{e_i}}}{R} - \frac{{{V_B}}}{R} = 0\) …1)
By applying KCL at node B,
\(\frac{{{V_B} - {V_A}}}{R} + \frac{{{V_B}}}{{{X_c}}} = 0\)
\({V_B}\left[ {\frac{1}{R} + \frac{1}{{{X_c}}}} \right] = \frac{{{V_A}}}{R} \Rightarrow {V_A} = {V_B}\left[ {1 + \frac{R}{{{X_c}}}} \right]\) …2)
From equation 1) and 2)-
\( \Rightarrow {V_B}\left[ {1 + \frac{R}{{{X_C}}}} \right]\left[ {\frac{2}{R} + \frac{1}{{{X_c}}}} \right] - \frac{{{V_B}}}{R} = \frac{{{e_i}}}{R}\)
\( \Rightarrow {V_B}\left[ {\frac{2}{R} + \frac{1}{{{X_c}}} + \frac{2}{{{X_c}}} + \frac{R}{{X_c^2}} - \frac{1}{R}} \right] = \frac{{{e_i}}}{R}\) …3)
As we can see from the circuit diagram, VB = e0
\( \Rightarrow {e_0}\left[ {\frac{1}{R} + \frac{3}{{{X_c}}} + \frac{R}{{X_c^2}}} \right] = \frac{{{e_i}}}{R}\)
\(\Rightarrow \frac{{{e_0}}}{{{e_i}}} = \frac{1}{{R\left[ {\frac{1}{R} + \frac{3}{{{X_c}}} + \frac{R}{{X_c^2}}} \right]}}\)
\(= \frac{1}{{{{\left( {CsR} \right)}^2} + 3RCs + 1}}\)
Time constant, T = RC
\(h\left( T \right) = \frac{1}{{{T^2}{s^2} + 3Ts + 1}}\)
Which one of the following statements related to modeling of system dynamics is NOT true?
- The transfer function is not changed by a linear transformation of state
- A given state description can be transformed to a controllable canonical form if the controllability matrix is nonsingular
- A change of state by a nonsingular linear transformation does not change the
- Zeros cannot be computed from its state description matrices
Answer (Detailed Solution Below)
Option 3 : A change of state by a nonsingular linear transformation does not change the
Modeling of Dynamic System:
- A dynamic system is a kind of system whose behavior is a function of time.
- Static system analysis does not give an accurate analysis while Dynamic system analysis does give an accurate analysis.
- Example: An aircraft is subjected to time-varying stress during the flight through turbulent air hard landing is an example of a Dynamic system.
- Dynamic system analysis is more complex than static system analysis since the conclusion based on static system analysis is not correct.
- In the dynamic system, the transfer function does not change by a linear transformation of the state.
- The dynamic modeling starts with the physical component description of the system's understanding of component behavior to create the mathematical model.
- A given state description in the mathematical model can be transformed to a controllable canonical form if the controllability matrix is non-singular. And zero cannot be computed from this matrix.

The dynamic system state variable is used for:
- Analysis, Identification, and Synthesis of Dynamic System.
- Predict the future behavior (Y) of the system when subjected to future input variables (U) and present (X).
The transfer function of tachometer is of the form
-
\(\frac{K}{{s\left( {s + 1} \right)}}\)
-
\(\frac{K}{{\left( {s + 1} \right)}}\)
-
\(\frac{K}{s}\)
-
K.s
Answer (Detailed Solution Below)
Output = e(t)
Input = (t)
\({\rm{e}}\left( {\rm{t}} \right) \propto \frac{{{\rm{d\theta }}\left( {\rm{t}} \right)}}{{{\rm{dt}}}}\)
Taking LT,
E(s) = Kts θ(s)
\(\Rightarrow {\rm{TF}} = \frac{{E\left( S \right)}}{{\theta\left( S \right)}} = {{\rm{k}}_t}s\)
Mathematical Modeling and Representation of Systems MCQ Question 9:
Consider a linear time-invariant system whose input r(t) and output y(t) are related by the following differential equation:
\(\frac{{{d^2}y\left( t \right)}}{{d{t^2}}} + 4y\left( t \right) = 6r\left( t \right)\)
The poles of this system are at- +2j, -2j
- +2, -2
- +4, -4
- +4j, -4j
Answer (Detailed Solution Below)
Option 1 : +2j, -2j
Concept:
A transfer function is defined as the ratio of Laplace transform of the output to the Laplace transform of the input by assuming initial conditions are zero.
TF = L[output]/L[input]
\(TF = \frac{{C\left( s \right)}}{{R\left( s \right)}}\)
For unit impulse input i.e. r(t) = δ(t)
⇒ R(s) = δ(s) = 1
Now transfer function = C(s)
Therefore, the transfer function is also known as the impulse response of the system.
Transfer function = L[IR]
IR = L-1 [TF]
Calculation:
Given the differential equation is,
\(\frac{{{d^2}y\left( t \right)}}{{d{t^2}}} + 4y\left( t \right) = 6r\left( t \right)\)
By applying the Laplace transform,
s2 Y(s) + 4 Y(s) = 6 R(s)
\( \Rightarrow \frac{{Y\left( s \right)}}{{R\left( s \right)}} = \frac{6}{{{s^2} + 4}}\)
Poles are the roots of the denominator in the transfer function.
⇒ s2 + 4 = 0
⇒ s = ±2j
Mathematical Modeling and Representation of Systems MCQ Question 10:
For the system given figure, e(t) is the error between input x(t) and output y(t)
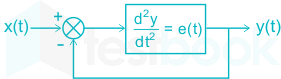
If x(t) = u(t) and all the initial conditions are zero, then e(t) will be
- –sin t
- –cos t
- sin t
- cos t
Answer (Detailed Solution Below)
Option 4 : cos t
From the block diagram,
e(t) = -y(t) + x(t)
\(\Rightarrow \frac{{{d^2}y}}{{d{t^2}}} = - y\left( t \right) + x\left( t \right)\)
\(\Rightarrow \frac{{{d^2}y}}{{d{t^2}}} = - y\left( t \right) + u\left( t \right)\)
By applying Laplace transform,
\(\Rightarrow {s^2}y\left( s \right) = - y\left( s \right) + \frac{1}{s}\)
\(\Rightarrow y\left( s \right) = \frac{1}{{s\left( {1 + {s^2}} \right)}}\)
\(e\left( t \right) = \frac{{{d^2}y}}{{d{t^2}}}\)
⇒ E(s) = s2 y(s)
\(\Rightarrow E\left( s \right) = {s^2} \times \frac{1}{{s\left( {1 + {s^2}} \right)}} = \frac{s}{{1 + {s^2}}}\)
By applying inverse Laplace transform,
⇒ e(t) = cos t
Mathematical Modelling Questions And Answers Pdf
Source: https://testbook.com/objective-questions/mcq-on-mathematical-modeling-and-representation-of-system--5eea6a1039140f30f369e947
Posted by: stanleygrou1963.blogspot.com
0 Response to "Mathematical Modelling Questions And Answers Pdf"
Post a Comment